NIH backs 3 projects to create medical co-robots





In its latest round of grants under the National Robotics Initiative, the agency is funding projects that could have bigger rewards down the road.
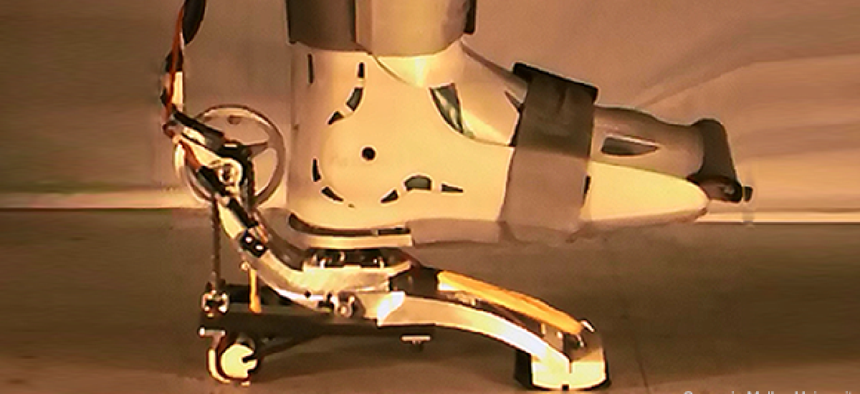
An ankle brace for recovering stroke victims that will help lead to better, less expensive assistive technologies.
A cane that sees its surroundings and communicates that information to a visually impaired user.
A catheter that compensates for the movement of a beating heart.
These are three examples of what the National Institutes of Health calls ”co-robots,” robotic technologies that adapt to their surroundings and work with people to improve medical procedures and assist in recovery.
NIH just announced $2.4 million in funding over five years for those projects, as part of its participation in the multiagency National Robotics Initiative.
“These projects have the potential to transform common medical aids into sophisticated robotic devices that enhance mobility for individuals with visual and physical impairments in ways only dreamed of before,” NIH Director Dr. Francis S. Collins said in the announcement. “In addition, as we continue to rely on robots to carry out complex medical procedures, it will become increasingly important for these robots to be able to sense and react to changing and unpredictable environments within the body. By supporting projects that develop these capabilities, we hope to increase the accuracy and safety of current and future medical robots.”
Researchers at North Carolina State and Carnegie Mellon Universities are developing the ankle exoskeleton, which is a platform for testing robotic controls with the goal of improving assistive technologies for people impaired by age, spinal cord injury, cerebral palsy or stroke. It could help develop methods for designing assistive devices specifically for individual patients, which could lead to more effective and less expensive devices.
The cane, a co-robotic navigation aid for the visually impaired, is being developed at the University of Arkansas at Little Rock. The goal is to use “computer vision” to identify stairs, doors and other structures and use an interaction mechanism to relay that information to the user. In addition to improving navigation for the visually impaired, the project could also find ways to improve robotic autonomy and portability, whcich could have uses is in law enforcement, search and rescue and military surveillance, NIH said.
The co-robotic catheter, being developed at Case Western Reserve University, could solve a problem with catheters used to prevent irregular heartbeats. NIH said the electrode at the tip of the catheter needs to maintain contact with the heart during the ablation procedure that prevents an irregular beat, which can be made difficult by the heart’s movement. The project’s goal is to combine robotics with real-time, high-resolution MRI imaging to increase accuracy.
NIH’s awards are part of the second round of funding by the National Robotics Initiative, a cooperative effort of the National Science Foundation, NASA, the Agriculture Department and NIH with the stated goal of developing robots that work with people cooperatively, hence the name co-robot.
Last year, during the first round of funding, NASA, announced eight projects as part of the program, including robotic planetary rovers and a powered leg prosthesis. With the second round under way, USDA recently handed out five grants worth a total of $4.5 million for using robotics in fruit harvesting, early disease and stress detection in fruits and vegetables and water sampling in remote areas.
NSF has issued a new solicitation for NRI projects, with awards expected in January 2014.
NEXT STORY: DOD doubles down on satellite communications